Info
Unless specified, all values in this section are in hexadecimal values.
Tip
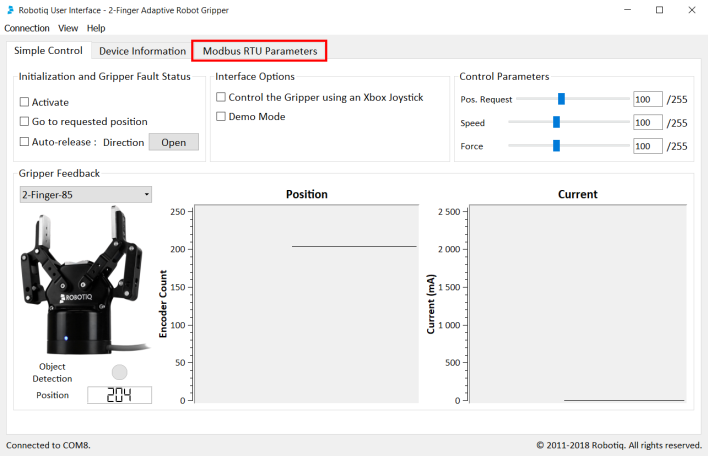
Robotiq suggests using the Robotiq User Interface test software to explore the various features of the Gripper, like object detection and force control.
Since the Robotiq Hand-E Gripper has its own embedded controller, high-level commands, such as "Go to requested position" are used to control it.
Info
The operator can:
- Control force, speed and position of the Gripper fingers.
- Finger movement is always synchronized, movement is initiated via a single "Go to requested position" command.
- Parallel or encompassing grip is performed automatically.
- A built-in object detection feature is available; the user can be notified after an object is picked once the "Go to" command has been initiated.
- Engage directional (open or close) auto-release for emergencies.
Control using registers
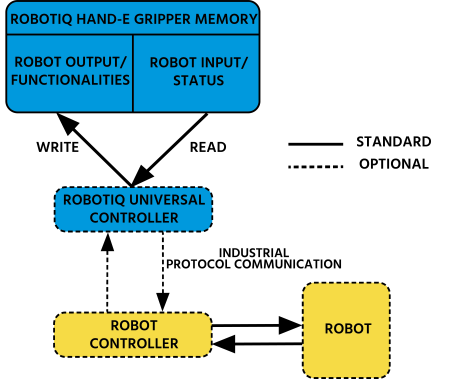
The Gripper has an internal memory that is shared with the robot controller. One part of the memory is for the robot output; gripper functionalities. The other part of the memory is for the robot input; gripper status. Two types of actions can then be performed by the robot controller :
The Gripper Register Mapping section will map the different registers used to control the Gripper or to read its status while theRobot Output Registers & Functionalities section will detail the output (write) register functions, and the Robot Input Registers & Status section will detail the input (read) register status. The figure below is a representation of the memory and the control logic of the Gripper.
Fig. 4-1: Hand-E control logic overview
Register mapping
Caution
Byte numbering starts at zero and not at 1 for the functionalities and status registers.
|
Register |
Robot Output / Functionalities |
Robot Input / Status |
|---|---|---|
|
Byte 0 |
ACTION REQUEST |
GRIPPER STATUS |
|
Byte 1 |
RESERVED |
RESERVED |
|
Byte 2 |
RESERVED |
FAULT STATUS |
|
Byte 3 |
POSITION REQUEST |
POS REQUEST ECHO |
|
Byte 4 |
SPEED |
POSITION |
|
Byte 5 |
FORCE |
CURRENT |
|
Byte 6 to 15 |
RESERVED |
RESERVED |
Table 4-1: Registers of the Hand-E Gripper.
Register: ACTION REQUEST
Address: Byte 0
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbols |
Reserved |
rARD |
rATR |
rGTO |
Reserved |
rACT |
||
rACT
First action to be made prior to any other actions; the rACT bit will activate the Gripper. Clear the rACT bit to reset the Gripper and clear any fault status.
Warning
When setting rACT (rACT ==1), the Gripper will begin movement to complete its activation feature.
Info
Power loss will set rACT (rACT == 1); the rACT bit must then be cleared (rACT == 0), then set again to allow operation of the Gripper.
Caution
The rACT bit must stay on afterwards for any other action to be performed.
rGTO
The "Go To" action moves the Gripper fingers to the requested position using the configuration defined by the other registers, rGTO will engage motion while bytes 3, 4 and 5 will determine aimed position, force and speed. The only motions performed without the rGTO bit are activation and automatic release routines.
rATR
Automatic Release routine action slowly opens the Gripper fingers until all motion axes reach their mechanical limits. After all motions are completed, the Gripper sends a fault signal and needs to be reinitialized before any other motion is performed. The rATR bit overrides all other commands excluding the activation bit (rACT).
Caution
The automatic release is meant to disengage the Gripper after an emergency stop of the robot.
The automatic release is not intended to be used under normal operating conditions.
Automatic release requires the rACT to be cleared (rACT == 0) then set (rACT == 1).
rARD
Auto-release direction. When auto-releasing, rARD commands the direction of the movement. The rARD bit should be set prior to or at the same time as the rATR bit, as the motion direction is set when the auto-release is initiated.
Register: GRIPPER OPTIONS
Address: Byte 1
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbol |
Reserved |
|||||||
Register: GRIPPER OPTIONS 2
Address: Byte 2
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbol |
Reserved |
|||||||
Register: POSITION REQUEST
Address: Byte 3
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbol |
rPR |
|||||||
This register is used to set the target position for the Gripper's fingers. The positions 0x00 and 0xFF correspond respectively to the fully opened and fully closed mechanical stops. For detailed finger trajectory, please refer to the Specifications section.
Info
The activation will allow the Gripper to adjust to any fingers/fingertips. No matter what is the size and/or shape of the fingers/fingertips, 0 will always be fully opened and 245 fully closed, with a quasi-linear relationship between the two values.
Register: SPEED
Address: Byte 4
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbol |
rSP |
|||||||
This register is used to set the Gripper closing or opening speed in real time, however, setting a speed will not initiate a motion.
Register: FORCE
Address: Byte 5
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbol |
rFR |
|||||||
The force setting defines the final gripping force for the Gripper. The force will fix the maximum current sent to the motor . If the current limit is exceeded, the fingers stop and trigger an object detection notification. Please refer to the Picking Features section for details on force control.
Info
Register bytes 6 to 15 are reserved and should be set to 0.
Register: GRIPPER STATUS
Address: Byte 0
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbols |
gOBJ |
gSTA |
gGTO |
Reserved |
gACT |
|||
gACT
Activation status, echo of the rACT bit (activation bit).
gGTO
Action status, echo of the rGTO bit (go to bit).
gSTA
Gripper status, returns the current status and motion of the Gripper fingers.
gOBJ
Object detection status, is a built-in feature that provides information on possible object pick-up. Ignore if gGTO == 0.
Caution
In some circumstances the object detection feature may not detect an object even if it is successfully grasped. For instance, picking up a thin object may be successful without the object detection status being triggered. In such applications, the "Fingers are at requested position" status of register gOBJ is sufficient to proceed to the next step of the routine.
Tip
Checking for the correct position of the fingers (byte 4), as well as object detection (byte 0, bit 6 & 7) before proceeding to the next step of a routine is a more reliable method than object detection or finger position alone.
Register: RESERVED
Address: Byte 1
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbol |
Reserved |
|||||||
Register: FAULT STATUS
Address: Byte 2
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbols |
kFLT |
gFLT |
||||||
gFLT
Fault status returns general error messages that are useful for troubleshooting. Fault LED (red) is present on the Gripper chassis, LED can be blue, red or both and be solid or blinking.
Minor faults (solid red LED)
Major faults (LED blinking red/blue) - Reset is required (rising edge on activation bit (rACT) needed).
Info
While booting, status LED will be solid blue/red.
kFLT
please refer to your optional controller manual (input registers and status).
Register: POSITION REQUEST ECHO
Address: Byte 3
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbol |
gPR |
|||||||
gPR
Echo of the requested position for the Gripper, value between 0x00 and 0xFF.
Register: POSITION
Address: Byte 4
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbol |
gPO |
|||||||
gPO
Actual position of the Gripper obtained via the encoders, value between 0x00 and 0xFF.
Register: CURRENT
Adress: Byte 5
|
Bits |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
|---|---|---|---|---|---|---|---|---|
|
Symbol |
gCU |
|||||||
gCU
The current is read instantaneously from the motor drive, value between 0x00 and 0xFF, approximate current equivalent is 10 * value read in mA.
Tip
Built-in features like object detection and force control use the fingers' electrical current readings. The user does not need to create these features.
As stated in previous sections, object picking is done via a simple "Go To" command, rGTO bit calls for movement, while rPR byte is the aimed position, rSP and rFR will be the desired speed and force settings respectively. This section describes key features in object picking applications:
The gripping force is controlled via the rFR byte (please refer to the Robot Output Registers & Functionalities section).The Gripper behavior will change according to the rFR force requested.
Measured grip force for steel of specific hardness (Vickers)
Coming soon
Measured grip force for silicone of specific hardness (Durometer)
Coming soon
Re-grasp feature is a built-in feature meant to prevent object lost due to slipping or inaccurate initial grip. The Re-grasp feature will allow the Gripper to initiate a movement when an object is slipping or dropped. When Re-grasping, the Gripper will attempt to close until it reaches the position request (rPR).
Info
Feature is off at force request rFR = 0, otherwise it is on.
Info
While your initial settings for force and speed are not used for Re-grasp, they will never be eceeded to prevent damaging the part.
Caution
The rOBJ status is cleared when a motion is detected.
When the Gripper grabs an object, the gOBJ status will allow you to know if contact with the object was successful. This is a built-in feature for adaptive grippers meant to be used by the robot controller (or PLC) commanding the overall application. The Object detection feature will change the gOBJ status and can be used inside your robot program.
As stated in the previous section:
gOBJ: Only valid if gGTO = 1.
Example of contact detected with an object:
Example of contact lost with an object:
The Hand-E Gripper is equipped with a brake that engages at the end of each and every Gripper move, and thus disengages between each of these moves.
For instance, when fully closing on an object, the Gripper makes contact with the surface of the object and activates the brake before sending the object detection signal to the robot.
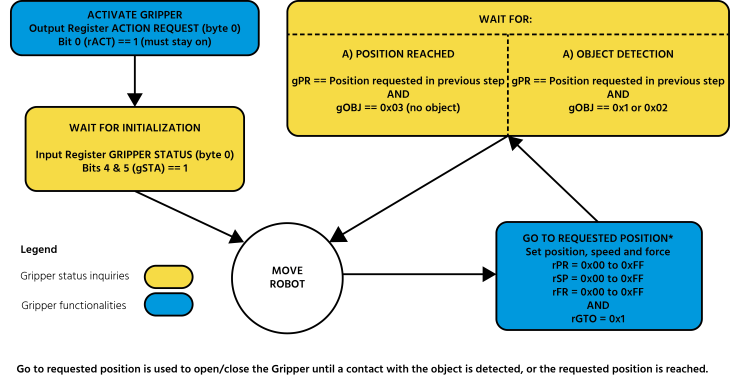
Fig. 4-2: Example of Gripper control logic with corresponding registers.
The Gripper can be controlled by Modbus RTU directly with RS485 or over USB using the ACC-ADT-USB-RS485. This section is intended to provide guidelines for setting up a Modbus master that will adequately communicate with the Gripper.
For a general introduction to Modbus RTU and for details regarding the CRC algorithm, the reader is invited to read the Modbus over serial line specification and implementation guide available at: http://www.modbus.org/docs/Modbus_over_serial_line_V1_02.pdf.
For debugging purposes, the reader is also invited to download one of many free Modbus scanners such as the CAS Modbus Scanner from Chipkin Automation Systems available at: http://www.store.chipkin.com/products/tools/cas-modbus-scanner.
Info
Modbus RTU is a communication protocol based on a Big Endian byte order. Therefore, the 16-bit register addresses are transmitted with the most significant byte first. However, the data port is in the case of Robotiq products based on the Little Endian byte order. As such, the data parts of Modbus RTU messages are sent with the less significant byte first.
Tip
Modbus RTU specifications and details can be found at www.modbus.org.
The following table describes the connection requirements for controlling the Gripper using the Modbus RTU protocol.
|
PROPRIETY |
DEFAULT VALUE |
|---|---|
|
Physical Interface |
RS-4851 |
|
Baud Rate2 |
115,200 bps |
|
Data Bits |
8 |
|
Stop Bit2 |
1 |
|
Parity2 |
None |
|
Supported Functions |
Read Holding Registers (FC03) Read Input Registers (FC04) Preset Multiple Registers (FC16) Master read & write multiple registers (FC23) |
|
Exception Responses |
Not supported |
|
Slave ID2 |
0x0009 (9) |
|
Robot Output / Gripper Input First Register |
0x03E8 (1000) |
|
Robot Input / Gripper Output First Register |
0x07D0 (2000) |
|
Termination Resistor2 |
120 ohms |
1 Various converters are available in the Spare Parts, Kits and Accessories section.
2 These parameters can be adjusted using the Robotiq User Interface.
Each register (word - 16 bits) of the Modbus RTU protocol is composed of 2 bytes (8 bits) from the Gripper. The first Gripper output Modbus register(0x07D0) is composed from the first 2 Robotiq Gripper bytes (byte 0 and byte 1).
Info
200 Hz is the maximum speed when commanding / reading from the Robotiq Gripper. It is therefore recommended to send commands with a minimum delay of 5 ms between them.
Info
120 Ohms termination resistor is already present on the converter and the Gripper. If multiple grippers are connected in parallel on the same RS485 cable, termination resistor must be set to OFF in communication parameters.
Function code 03 (FC03) is used for reading the status of the Gripper (robot input). Examples of such data are Gripper status, object status, finger position, etc.
Example of an FC03 read function:
This message asks for register 0x07D0 (2000) and register 0x07D1 (2001) which contains Gripper Status, Object Detection, Fault Status and Position Request Echo.
Request is: 09 03 07 D0 00 02 C5 CE
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
03 |
Function Code 03 (Read Holding Registers) |
|
07D0 |
Address of the first requested register |
|
0002 |
Number of registers requested (2) |
|
C5CE |
Cyclic Redundancy Check (CRC) |
Response is: 09 03 04 E0 00 00 00 44 33
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
03 |
Function Code 03 (Read Holding Registers) |
|
04 |
Number of data bytes to follow (2 registers x 2 bytes/register = 4 bytes) |
|
E000 |
Content of register 07D0 |
|
0000 |
Content of register 07D1 |
|
4433 |
Cyclic Redundancy Check (CRC) |
Function code 04 (FC04) is used for requesting the status of the Gripper's analog input register. Examples of such data are Gripper status, object status, finger position, etc.
Example of an FC04 read function:
This message asks for register 0x07D0 (2000) and register 0x07D1 (2001) which contains Gripper Status, Object Detection, Fault Status and Position Request Echo.
Request is: 09 04 07 D0 00 02 70 0E
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
04 |
Function Code 04 (Read Input Registers) |
|
07D0 |
Address of the first requested register |
|
0002 |
Number of registers requested (2) |
|
700E |
Cyclic Redundancy Check (CRC) |
Response is: 09 04 04 E0 00 00 00 44 33
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
04 |
Function Code 04 (Read Holding Registers) |
|
04 |
Number of data bytes to follow (2 registers x 2 bytes/register = 4 bytes) |
|
E000 |
Content of register 07D0 |
|
0000 |
Content of register 07D1 |
|
4584 |
Cyclic Redundancy Check (CRC) |
Function code 06 (FC16) is used to activate functionalities of the Gripper (robot output). Examples of such data are action request, speed, force, etc.
Example of setting multiple registers FC16:
This message requests to set position request, speed and force of the Gripper by setting register 0x03E9 (1002) and 0x03EA.
Request is: 09 10 03 E9 00 02 04 60 E6 3C C8 EC 7C
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
10 |
Function Code 16 (Preset Multiple Registers) |
|
03E9 |
Address of the first register |
|
0002 |
Number of registers written to |
|
04 |
Number of data bytes to follow (2 registers x 2 bytes/register = 4 bytes) |
|
60E6 |
Value written to register 0x03E9 |
|
3CC8 |
Value written to register 0x03EA |
|
EC7C |
Cyclic Redundancy Check (CRC) |
Response is: 09 10 03 E9 00 02 91 30
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
10 |
Function Code 16 (Preset Multiple Registers) |
|
03E9 |
Address of the first register |
|
0002 |
Number of written registers |
|
9130 |
Cyclic Redundancy Check (CRC) |
Function code 23 (FC23) is used for reading the status of the Gripper (robot input) and activating functionalities of the Gripper (robot output) simultaneously. Examples of such data are Gripper status, object status, finger position, etc. Action requests are speed, force, etc.
Example of reading and writing multiple registers FC23:
This message reads registers 0x07D0 (2000) and 0x07D1 (2001), which contains Gripper Status, Object Detection, Fault Status and Position Request Echo. It also sets the position request, speed and force of the Gripper by writing to registers 0x03E9 (1001) and 0x03EA (1002).
Request is: 09 17 07 D0 00 02 03 E9 00 02 04 00 E6 3C C8 2D 0C
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
17 |
Function Code 23 (read and write multiple registers) |
|
07D0 |
Address of the first requested register, read |
|
0002 |
Number of registers requested (2), read |
|
03E9 |
Address of the first register written to |
|
0002 |
Number of registers written to (3) |
|
04 |
Number of data bytes to follow (2 registers X 2 bytes/registers = 4 bytes) |
|
00E6 |
Value written to register 0x03E9 |
|
3CC8 |
Value written to register 0x03EA |
|
2D0C |
Cyclic Redundancy Check (CRC) |
Response is: 09 17 04 01 00 09 E6 F6 C1
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
17 |
Function Code 23 (read and write multiple registers) |
|
04 |
Number of data bytes to follow (2 registers x 2 bytes/register = 4 bytes) |
|
1000 |
Content of register 07D0 |
|
09E6 |
Content of register 07D1 |
|
F6C1 |
Cyclic Redundancy Check (CRC) |
Note that the content of the response might change depending on the Gripper's status.
Info
The Gripper will execute the input command (i.e.: write), execute one cycle of motion, update the output, then return the Modbus response read.
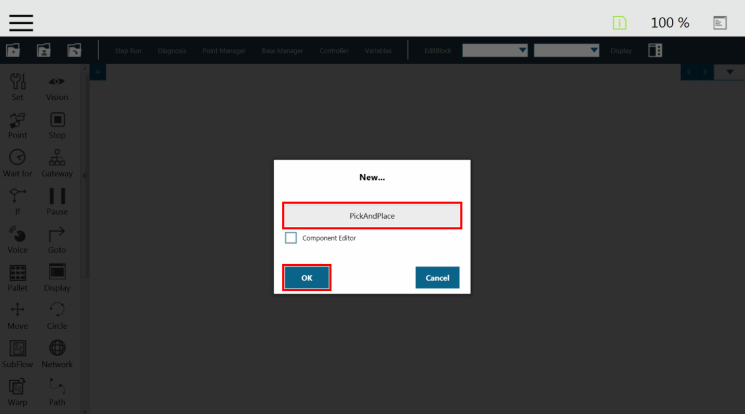
This section depicts the example from the Control Logic Example section, when programmed using the Modbus RTU protocol. The example is typical of a pick and place application. After activating the Gripper, the robot is moved to a pick-up location to grip an object. It moves again to a second location to release the gripped object.
Step 1: Activation Request ( clear and set rACT)
Request is (clear rAct): 09 10 03 E8 00 03 06 00 00 00 00 00 00 73 30
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
10 |
Function Code 16 (Preset Multiple Registers) |
|
03E8 |
Address of the first register |
|
0003 |
Number of registers written to |
|
06 |
Number of data bytes to follow (3 registers x 2 bytes/register = 6 bytes) |
|
0000 |
Value to write to register 0x03E9 (ACTION REQUEST = 0x01 and GRIPPER OPTIONS = 0x00): rACT = 1 for "Activate Gripper" |
|
0000 |
Value written to register 0x03EA |
|
0000 |
Value written to register 0x03EB |
|
7330 |
Cyclic Redundancy Check (CRC) |
Response is: 09 10 03 E8 00 03 01 30
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
10 |
Function Code 16 (Preset Multiple Registers) |
|
03E8 |
Address of the first register |
|
0003 |
Number of written registers |
|
0130 |
Cyclic Redundancy Check (CRC) |
Request is (set rAct): 09 10 03 E8 00 03 06 01 00 00 00 00 00 72 E1
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
10 |
Function Code 16 (Preset Multiple Registers) |
|
03E8 |
Address of the first register |
|
0003 |
Number of registers written to |
|
06 |
Number of data bytes to follow (3 registers x 2 bytes/register = 6 bytes) |
|
0100 |
Value to write to register 0x03E9 (ACTION REQUEST = 0x01 and GRIPPER OPTIONS = 0x00): rACT = 1 for "Activate Gripper" |
|
0000 |
Value written to register 0x03EA |
|
0000 |
Value written to register 0x03EB |
|
72E1 |
Cyclic Redundancy Check (CRC) |
Response is: 09 10 03 E8 00 03 01 30
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
10 |
Function Code 16 (Preset Multiple Registers) |
|
03E8 |
Address of the first register |
|
0003 |
Number of written registers |
|
0130 |
Cyclic Redundancy Check (CRC) |
Step 2: Read Gripper status until the activation is completed
Request is: 09 03 07 D0 00 01 85 CF
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
03 |
Function Code 03 (Read Holding Registers) |
|
07D0 |
Address of the first requested register |
|
0001 |
Number of registers requested (1) |
|
85CF |
Cyclic Redundancy Check (CRC) |
Response (if the activation IS NOT completed): 09 03 02 11 00 55 D5
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
03 |
Function Code 03 (Read Holding Registers) |
|
02 |
Number of data bytes to follow (1 register x 2 bytes/register = 2 bytes) |
|
1100 |
Content of register 07D0 (GRIPPER STATUS = 0x11, RESERVED = 0x00): gACT = 1 for "Gripper Activation", gSTA = 1 for "Activation in progress" |
|
55D5 |
Cyclic Redundancy Check (CRC) |
Response (if the activation IS completed): 09 03 02 31 00 4C 15
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
03 |
Function Code 03 (Read Holding Registers) |
|
02 |
Number of data bytes to follow (1 register x 2 bytes/register = 2 bytes) |
|
3100 |
Content of register 07D0 (GRIPPER STATUS = 0x31, RESERVED = 0x00): gACT = 1 for "Gripper Activation", gSTA = 3 for "Activation is completed" |
|
4C15 |
Cyclic Redundancy Check (CRC) |
Step 3: Move the robot to the pick-up location
Step 4: Close the Gripper at full speed and full force
Request is: 09 10 03 E8 00 03 06 09 00 00 FF FF FF 42 29
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
10 |
Function Code 16 (Preset Multiple Registers) |
|
03E8 |
Address of the first register |
|
0003 |
Number of registers written to |
|
06 |
Number of data bytes to follow (3 registers x 2 bytes/register = 6 bytes) |
|
0900 |
Value written to register 0x03E8 (ACTION REQUEST = 0x09 and GRIPPER OPTIONS = 0x00): rACT = 1 for "Activate Gripper", rGTO = 1 for "Go to Requested Position" |
|
00FF |
Value written to register 0x03E9 (GRIPPER OPTIONS 2 = 0x00 and POSITION REQUEST = 0xFF): rPR = 255/255 for full closing of the Gripper |
|
FFFF |
Value written to register 0x03EA (SPEED = 0xFF and FORCE = 0xFF): full speed and full force |
|
4229 |
Cyclic Redundancy Check (CRC) |
Response is: 09 10 03 E8 00 03 01 30
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
10 |
Function Code 16 (Preset Multiple Registers) |
|
03E8 |
Address of the first register |
|
0003 |
Number of written registers |
|
0130 |
Cyclic Redundancy Check (CRC) |
Step 5: Read Gripper status until the grip is completed
Request is: 09 03 07 D0 00 03 04 0E
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
03 |
Function Code 03 (Read Holding Registers) |
|
07D0 |
Address of the first requested register |
|
0003 |
Number of registers requested (3) |
|
040E |
Cyclic Redundancy Check (CRC) |
Example of response if the grip is not completed: 09 03 06 39 00 00 FF 0E 0A F7 8B
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
03 |
Function Code 03 (Read Holding Registers) |
|
06 |
Number of data bytes to follow (3 registers x 2 bytes/register = 6 bytes) |
|
3900 |
Content of register 07D0 (GRIPPER STATUS = 0x39, RESERVED = 0x00): gACT = 1 for "Gripper Activation", gGTO = 1 for "Go to Position Request" and gOBJ = 0 for "Fingers are in motion" |
|
00FF |
Content of register 07D1 (FAULT STATUS = 0x00, POSITION REQUEST ECHO = 0xFF): the position request echo tells that the command was well received and that the GRIPPER STATUS is valid. |
|
0E0A |
Content of register 07D2 (POSITION = 0x0E, FINGER CURRENT = 0x0A): the position is 14/255 and the motor current is 100mA (these values will change during motion) |
|
F78B |
Cyclic Redundancy Check (CRC) |
Example of response if the grip is completed: 09 03 06 B9 00 00 FF BD 00 1D 7C
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
03 |
Function Code 03 (Read Holding Registers) |
|
06 |
Number of data bytes to follow (3 registers x 2 bytes/register = 6 bytes) |
|
B900 |
Content of register 07D0 (GRIPPER STATUS = 0xB9, RESERVED = 0x00): gACT = 1 for "Gripper Activation", gGTO = 1 for "Go to Position Request" and gOBJ = 2 for "Fingers have stopped due to a contact while closing" |
|
00FF |
Content of register 07D1 (FAULT STATUS = 0x00, POSITION REQUEST ECHO = 0xFF): the position request echo tells that the command was well received and that the GRIPPER STATUS is valid. |
|
BD00 |
Content of register 07D2 (POSITION = 0xBD, FINGER CURRENT = 0x00): the position is 189/255 (can be used to validate the size of the seized object) |
|
1D7C |
Cyclic Redundancy Check (CRC) |
Step 6: Move the robot to the release location
Step 7: Open the Gripper at full speed and full force
Request is: 09 10 03 E8 00 03 06 09 00 00 00 FF FF 72 19
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
10 |
Function Code 16 (Preset Multiple Registers) |
|
03E8 |
Address of the first register |
|
0003 |
Number of registers written to |
|
06 |
Number of data bytes to follow (3 registers x 2 bytes/register = 6 bytes) |
|
0900 |
Value written to register 0x03E8 (ACTION REQUEST = 0x09 and GRIPPER OPTIONS = 0x00): rACT = 1 for "Activate Gripper", rGTO = 1 for "Go to Requested Position" |
|
0000 |
Value written to register 0x03E9 (GRIPPER OPTIONS 2 = 0x00 and POSITION REQUEST = 0x00): rPR = 0/255 for full opening of the Gripper (partial opening would also be possible) |
|
FFFF |
Value written to register 0x03EA (SPEED = 0xFF and FORCE = 0xFF): full speed and full force |
|
7219 |
Cyclic Redundancy Check (CRC) |
Response is: 09 10 03 E8 00 03 01 30
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
10 |
Function Code 16 (Preset Multiple Registers) |
|
03E8 |
Address of the first register |
|
0003 |
Number of written registers |
|
0130 |
Cyclic Redundancy Check (CRC) |
Step 8: Read Gripper status until the opening is completed
Request is: 09 03 07 D0 00 03 04 0E
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
03 |
Function Code 03 (Read Holding Registers) |
|
07D0 |
Address of the first requested register |
|
0003 |
Number of registers requested (3) |
|
040E |
Cyclic Redundancy Check (CRC) |
Example of response if the opening is not completed: 09 03 06 39 00 00 00 BB 10 30 E0
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
03 |
Function Code 03 (Read Holding Registers) |
|
06 |
Number of data bytes to follow (3 registers x 2 bytes/register = 6 bytes) |
|
3900 |
Content of register 07D0 (GRIPPER STATUS = 0x39, RESERVED = 0x00): gACT = 1 for "Gripper Activation", gGTO = 1 for "Go to Position Request" and gOBJ = 0 for "Fingers are in motion" |
|
0000 |
Content of register 07D1 (FAULT STATUS = 0x00, POSITION REQUEST ECHO = 0x00): the position request echo tells that the command was well received and that the GRIPPER STATUS is valid. |
|
BB10 |
Content of register 07D2 (POSITION = 0xBB, FINGER CURRENT = 0x10): the position is 187/255 and the motor current is 160mA (these values will change during motion) |
|
30E0 |
Cyclic Redundancy Check (CRC) |
Example of response if the opening is completed: 09 03 06 F9 00 00 00 0D 00 56 4C
|
Bits |
Description |
|---|---|
|
09 |
SlaveID |
|
03 |
Function Code 03 (Read Holding Registers) |
|
06 |
Number of data bytes to follow (3 registers x 2 bytes/register = 6 bytes) |
|
F900 |
Content of register 07D0 (GRIPPER STATUS = 0xF9, RESERVED = 0x00): gACT = 1 for "Gripper Activation", gGTO = 1 for "Go to Position Request" and gOBJ = 3 for "Fingers are at requested position" |
|
0000 |
Content of register 07D1 (FAULT STATUS = 0x00, POSITION REQUEST ECHO = 0x00): the position request echo tells that the command was well received and that the GRIPPER STATUS is valid. |
|
0D00 |
Content of register 07D2 (POSITION = 0x0D, FINGER CURRENT = 0x00): the position is 13/255 (the fingers have reached their software limit) |
|
564C |
Cyclic Redundancy Check (CRC) |
Step 9: Loop back to step 3 if other objects have to be gripped.
|
Hardware Version |
TM Flow Version |
TM Gripper Component |
Robotiq RS232 Converter |
|---|---|---|---|
|
HW1, HW2, HW3 |
1.68 and later |
HANDE_V002_XXX |
Compatible |
![]()
Here is the list of the current Robotiq Gripper TM Components to install on TM Robots:
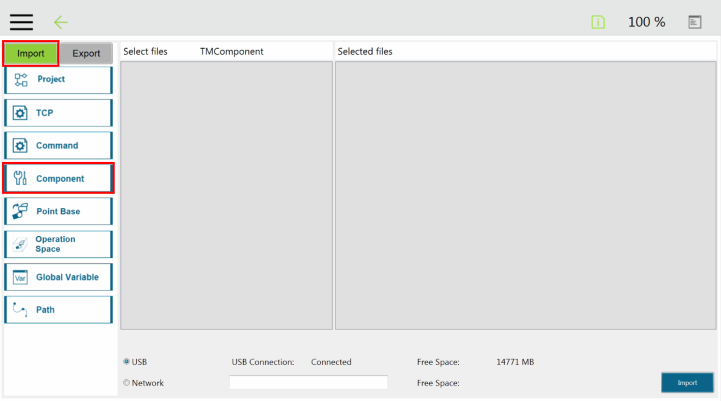
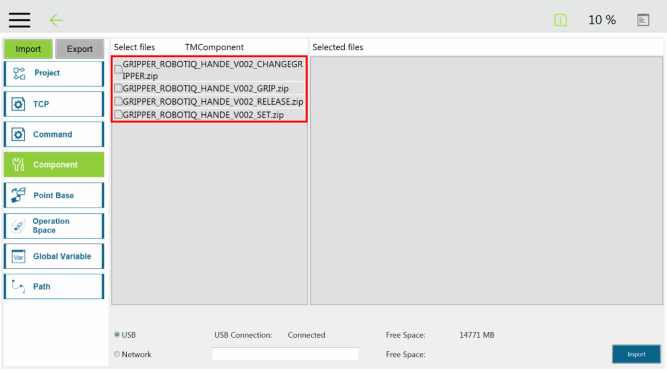
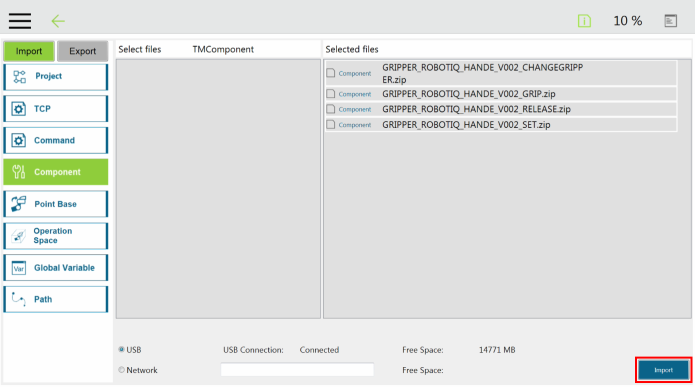
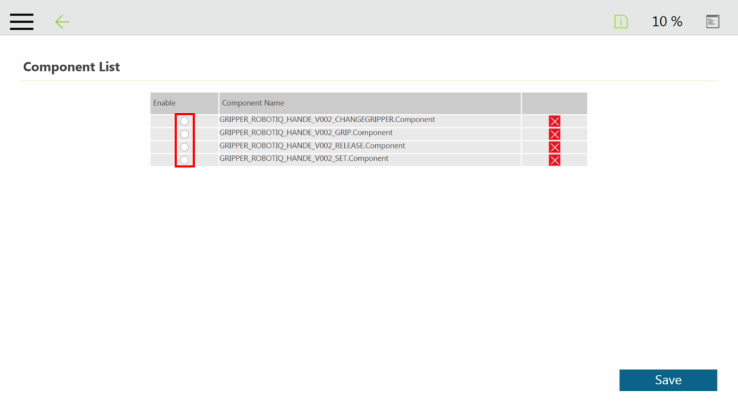
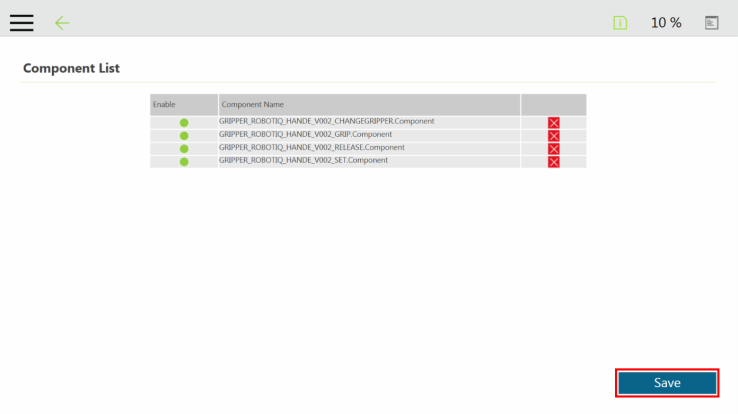
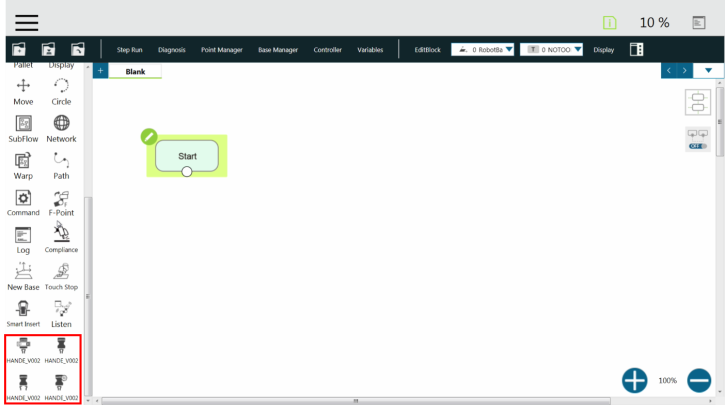
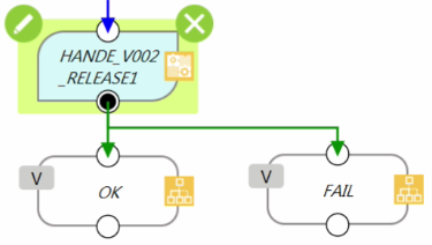
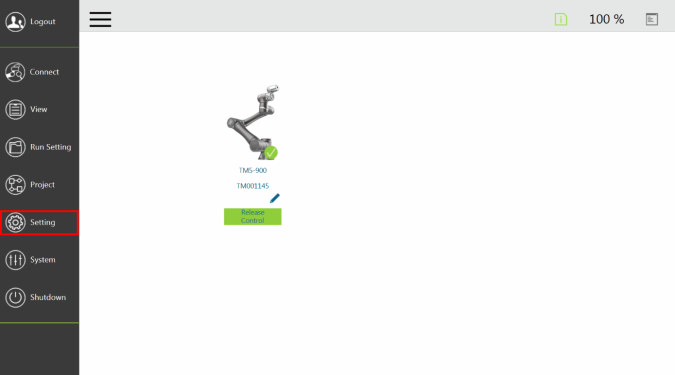
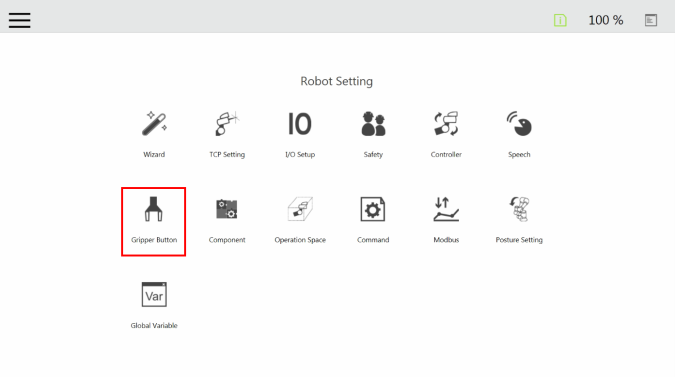
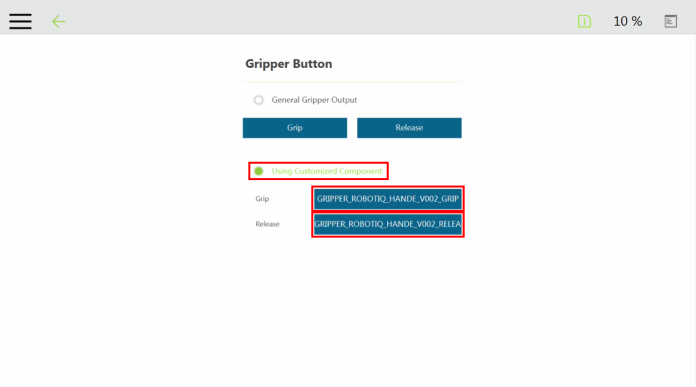
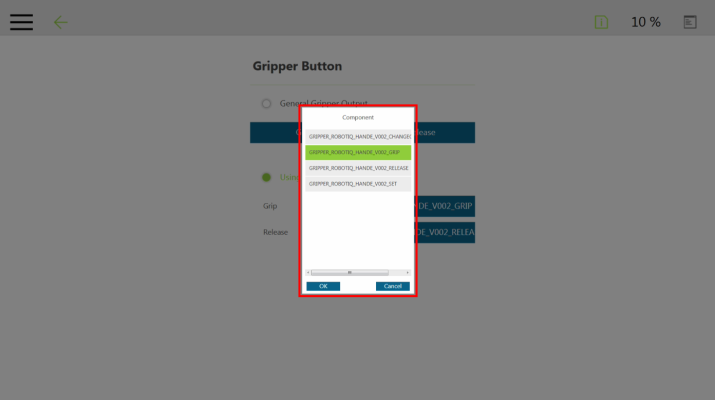
The user can assign Gripper Components to the Gripper button and use the latter to open and close the fingers of the Robotiq Gripper.
|
Component Icon |
Component Node |
|---|---|
|
|
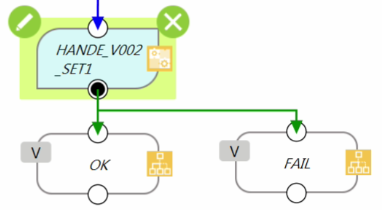
|

Fig. 4-3: SET Node Settings Menu
|
Setting |
Variable |
Type |
Default |
Description |
|
|---|---|---|---|---|---|
|
Initialize_or_Not |
var_reset |
bool |
false |
Set True if you want to initialize the gripper in this node. If you only want to chenge gripping force, position or speed, you don't need to initialize the gripper (please set false) |
|
|
Grip_Setting |
var_grip_force |
% |
50% |
Set gripping force |
|
|
Hand-E |
0~100%=20~130N |
||||
|
var_grip_speed |
% |
50% |
Set gripping speed |
||
|
Hand-E |
0~100%=20~150mm/s |
||||
|
var_grip_pos |
% |
80% |
Set gripping position |
||
|
Hand-E |
0~100%=0~50mm/s |
||||
|
Release_Setting |
var_Release_force |
% |
50% |
Set gripping force |
|
|
Hand-E |
0~100%=20~130N |
||||
|
var_Release_speed |
% |
50% |
Set gripping speed |
||
|
Hand-E |
0~100%=20~150mm/s |
||||
|
var_Release_pos |
% |
80% |
Set gripping position |
||
|
Hand-E |
0~100%=0~50mm/s |
||||
|
ComPort_Setting |
var_ComPort |
int |
1 |
Please set as Com1, Com2, Com3, following the com port to which you connect the gripper. |
|
|
Component Icon |
Component Node |
|---|---|
|
|
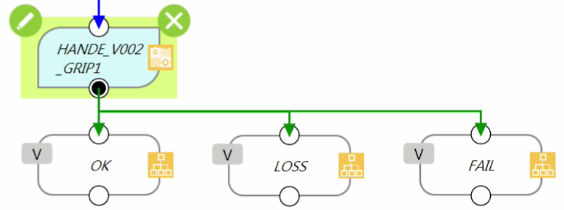
|

Fig. 4-4: GRIP Node Settings Menu
|
Setting |
Variable |
Type |
Default |
Description |
|
|---|---|---|---|---|---|
|
Grip_Setting (SET Node) |
var_grip_force |
% |
50% |
Set gripping force |
|
|
Hand-E |
0~100%=20~130N |
||||
|
var_grip_speed |
% |
50% |
Set gripping speed |
||
|
Hand-E |
0~100%=20~150mm/s |
||||
|
var_grip_pos |
% |
80% |
Set gripping position |
||
|
Hand-E |
0~100%=0~50mm/s |
||||
|
Component Icon |
Component Node |
|---|---|
|
|
|

Fig. 4-5: RELEASE Node Settings Menu
|
Setting |
Variable |
Type |
Default |
Description |
|
|---|---|---|---|---|---|
|
Release_Setting (SET Node) |
var_grip_force |
% |
50% |
Set gripping force |
|
|
Hand-E |
0~100%=20~130N |
||||
|
var_grip_speed |
% |
50% |
Set gripping speed |
||
|
Hand-E |
0~100%=20~150mm/s |
||||
|
var_grip_pos |
% |
80% |
Set gripping position |
||
|
Hand-E |
0~100%=0~50mm/s |
||||
|
Component Icon |
Component Node |
|---|---|
|
|
|

|
Setting |
Variable |
Type |
Default |
Description |
|
|---|---|---|---|---|---|
|
Change_Gripper |
Var_Slave_ID |
int |
9 |
Select the Slave ID as the current gripper |
|
Info
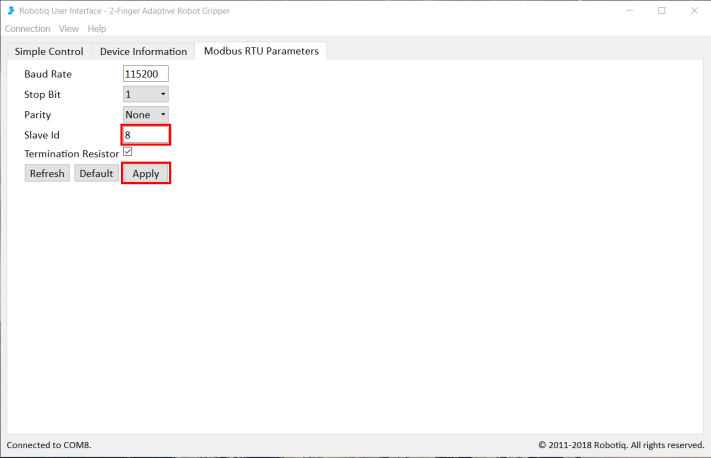
Use the Robotiq User Interface to change the Modbus Slave ID Address of the second gripper when using a dual gripper (Default = 9).
The user can change the Modbus Slave ID of a Robotiq Gripper via the Robotiq User Interface.
Installer
Browse to the support page of the Gripper in the Software section to download the RUI installer (.exe).
Robotiq User Interface
Browse to the support page of the Gripper, in the Documents section, to access or download the instruction manual of the Robotiq User Interface (RUI) for information on the installation and control of the RUI.