The terms "Gripper", "Adaptive Gripper", "Robotiq Gripper", "Robotiq Adaptive Gripper", "2-Finger 85", "2-Finger 140", "2F-85" and "2F-140" used in the following manual all refer to the Robotiq 2-Finger Adaptive Robot Gripper. The Robotiq 2-Finger Adaptive Gripper has two versions, 85 and 140. The 2-Finger version will change finger opening dimensions, which will be 85 mm (2F-85) or 140 mm (2F-140). Both versions use the same base, installation and control will be exactly the same. The 2-Finger Gripper is a robotic peripheral that is designed for industrial applications. Its design makes it a unique robotic end-of-arm tool to quickly pick, place and handle a large range of objects of varying sizes and shapes.
Info
Unless specified, information in this manual applies to both the 85 and the 140 mm version of the 2-Finger Adaptive Robot Gripper.
Info
The following manual uses the metric system, unless specified, all dimensions are in millimeters.
Info
The following section presents the key features of the grasp-type gripper and must not be considered as appropriate to the gripper operation, each feature is detailed in the appropriate section of the manual. Safety guidelines must be read and understood before any operation is attempted with the grasp-type gripper.
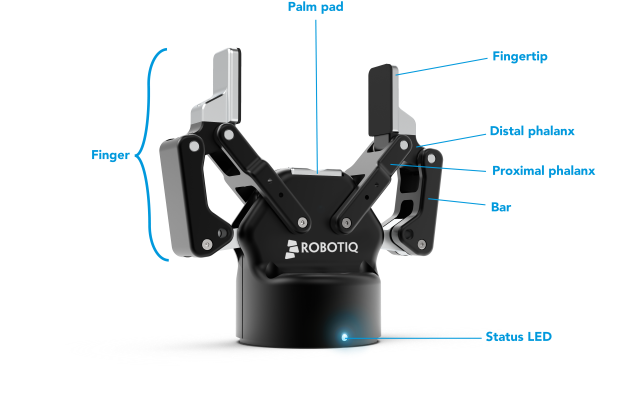
The 2-Finger Gripper has two articulated fingers that each have two joints (two phalanxes per finger), as shown in the figure below. The grasp-type gripper can engage up to five points of contact with an object (two on each of the phalanges plus the palm). The fingers are under-actuated, meaning they have fewer motors than the total number of joints. This configuration allows the fingers to automatically adapt to the shape of the object they grasp and it also simplifies the control of the grasp-type gripper.
Fig. 1-1: Robotiq 2-Finger Adaptive Gripper.
Please refer to the Spare Parts, Kits and Accessories section for details on standard and optional parts.
The 2-Finger Gripper comes with either 85 mm opening (2-Finger 85) or 140 mm opening (2-Finger 140) according to the figure below. The chassis will remain the same, only the fingers will change. Please refer to the Mechanical Installation section for installation instructions. Finger kits are available in the Spare Parts and Accessories section.
Info
Details on the 2-Finger 85 and 2-Finger 140 (dimensions and specifications) can be found in the Specifications section.
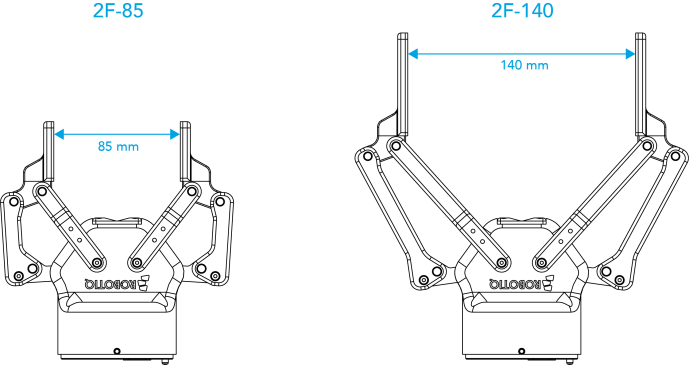
Fig. 1-2: The 2-Finger 85 and 140 mm versions.
The 2-Finger Gripper has a single actuator for opening and closing the fingers, the fingers automatically adapt to the shape of the object manipulated.
Fingers will adopt either a parallel grasp or encompassing grasp as shown in the figure below.
Info
Closing or opening is done via the "Go to requested position" command and is input to the Gripper Whether the fingers close to produce an emcompassing or fingertip grasp is decided at the Gripper level automatically. It will depend on:
In other words, picking the same object could result in either an emcompassing or fingertip grasp based on an object's position and geometry.
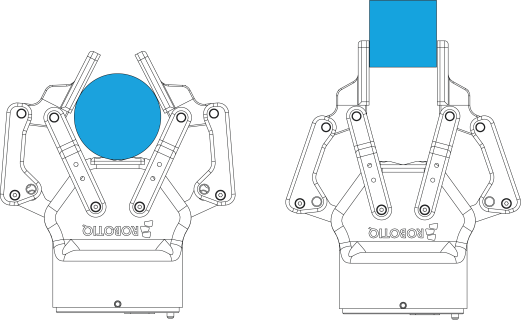
Fig. 1-3: 2-Finger parallel and encompassing grips.
Info
It is important to note that a fingertip grasp can only be performed when the fingers touch the object with the upper section of the distal phalanxes first. Inversely, for an encompassing grip, the fingers must touch the object with the proximal or the lower section of the distal phalanxes first. Also, to ensure stability, the object should be held against the Gripper palm while performing an encompassing grip. Refer to the figure below for a visual representation of the parallel and encompassing grasp regions on the distal phalanx of the 2-Finger Gripper.
The 2-Finger Adaptive Robot Gripper also allows for internal grasping. The fingers can pick hollow objects from the inside by applying pressure with the outside of the fingers. Refer to the figure below for a visual representation and to the Picking Features section for details on the possible position commands of your Gripper.
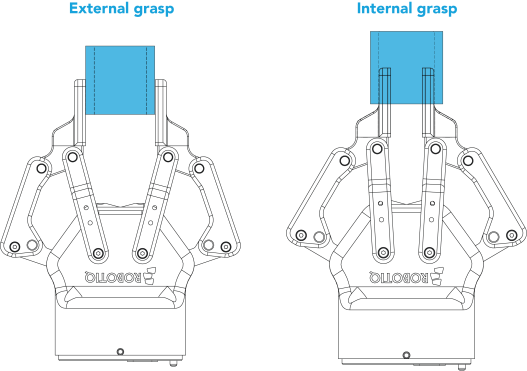
Fig. 1-4: Finger internal and external grasping.
The Gripper equilibrium line is the grasping region that separates the encompassing grasp from the parallel grip. When grasping an object close enough to the inside (palm) of the Gripper, the encompassing grasp will occur (unless the object size or shape is not adequate) and the fingers will close around the object.
If grasped above the equilibrium line, the same object will be picked up in a parallel grasp by the fingertips and the fingers will close with a parallel motion. The figure below shows the encompassing grasp region, the equilibrium line, and the parallel grasp region on the 2-Finger Adaptive Robot Gripper.
Info
The details of the equilibrium line relation between opening angle and the related position d can be found in the Mechanical specifications section.
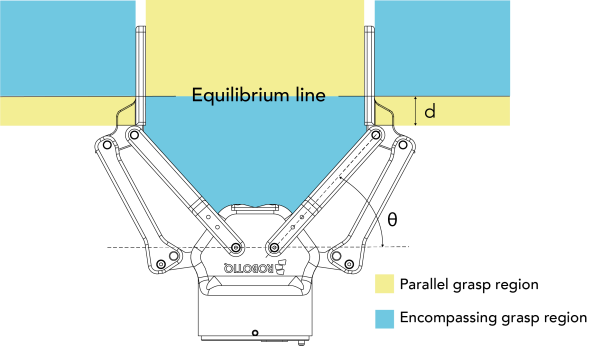
Fig. 1-5: Equilibrium line on the 2-Finger, shown with no fingertip pads.
Tip
Grasping an object that could be grasped by an encompassing grasp (a cylinder for example) on the equilibrium line is not recommended, as slight variations on the position will switch the grasp from parallel to encompassing and vice versa. Robot programming should be done so that the grasping mode will be predetermined.
The Gripper is powered and controlled directly via a single Device Cable that carries a 24V DC supply and Modbus RTU communication over RS-485, see Section 3.5 for wiring information and Section 4 for control of the Gripper (various software packages are available for control via various robot controllers).
Info
Robotiq Universal Controller is available when industrial communication protocols are required (other then Modbus RTU over serial).
Gripper Coupling is required for 2-Finger usage, the Coupling will provide mechanical and electrical connectivity. Please refer to the Mechanical Installation section for installation of the Coupling, to the Specifications section for technical drawings, and to the Spare Parts, Kits and Accessories section for available couplings.
The 2-Finger has an embedded object detection feature using indirect sensing methods. When picking an object via the "go to" command, the Gripper status will allow you to know if an object is picked or not via a simple object detection bit (0 or 1). When an object is detected, the Gripper will stop. If the object is being dropped, the Gripper will automatically close to keep the object until the ''go to'' command limit is attained. For details on object detection, see Control section.